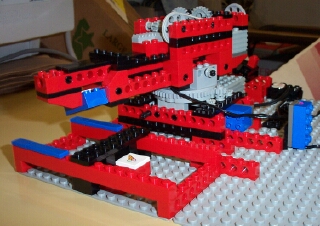
This is the same robotic arm but I added a color sensor to sort the legos by color. I had to add new procedures to make the color sensor work. It took me about one week to finaly make the color sensor to sort the legos by red and blue to pick up the legos from the chute. It picks up the legos 4 times, puts the blue legos in the blue bin, and puts the red legos in the red bin. Below is a picture of my robotic arm and its procedures.
TO PLACE.DISTANT
PICK.FROM.CHUTE
HAND.CLOSE
TALKTO "MOTORA SETRIGHT
ON
WAITUNTIL[ANGLE5 < -60]
OFF
HAND.OPEN
END
TO PLACE.LOCAL
TO HAND.OPEN
TO HAND.CLOSE
TO PLACE.ALL
TO PLACE.BY.COLOR
TO CHECK.COLOR
TO BLUE
TO RED
TO PLACE.COLOR
PICK.FROM.CHUTE
HAND.CLOSE
TALKTO "MOTORA SETRIGHT
ON
WAITUNTIL[ANGLE5 < -50]
OFF
HAND.OPEN
TALKTO "MOTORA SETLEFT
ON
WAITUNTIL[ANGLE5 > 0]
OFF
END
TALKTO "MOTORB SETLEFT
ONFOR 3
END
TALKTO "MOTORB SETRIGHT
ONFOR 5
END
PLACE.LOCAL
PLACE.DISTANT
PLACE.LOCAL
END
PICK.FROM.CHUTE
HAND.CLOSE
TALKTO "MOTORA SETRIGHT
ON
WAITUNTIL [ANGLE5 = -27]
OFF
WAIT 10
CHECK.COLOR
END
IF LIGHT8 >= 43[RED]
IF LIGHT8 < 43[BLUE]
END
TALKTO "MOTORA SETRIGHT
ON
WAITUNTIL[ANGLE5 = -62]
OFF
HAND.OPEN
END
TALKTO "MOTORA SETRIGHT
ON
WAITUNTIL[ANGLE5 = -50]
OFF
HAND.OPEN
END
REPEAT 4[PLACE.BY.COLOR]
END