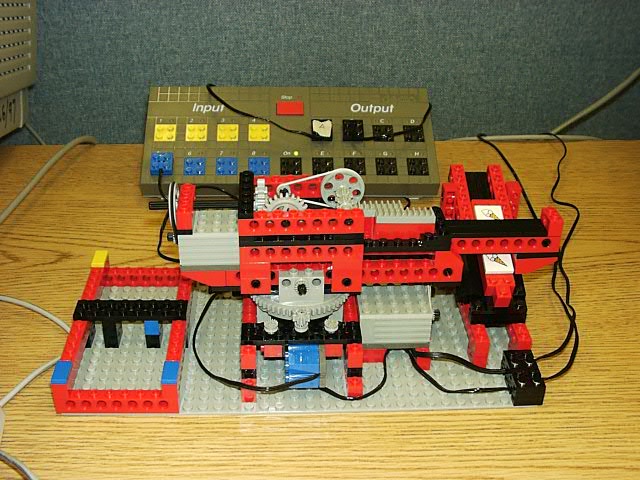
Hi, my name is Elliott. I built a robotic arm out of Legos. I didn't have many problems, the only problem I had was finding the right Lego bricks. It took me 2 days to build and program the robotic arm. There were 6 procedures in programming the arm. Three procedures controlled the movement of the arm, 2 controlled the hand and the place.all procedure controlled how many Lego bricks were picked up and dropped by the robotic arm. I made two buttons, one to start and one for emergency stop.
Below is a picture and the programming.
TO PLACE.DISTANT
PICK.FROM.CHUTE
HAND.CLOSE
TALKTO "MOTORA
SETRIGHT
ON
WAITUNTIL [ANGLE5 < -60]
OFF
HAND.OPEN
END
TO PLACE.LOCAL
PICK.FROM.CHUTE
HAND.CLOSE
TALKTO "MOTORA
SETRIGHT
ON
WAITUNTIL [ANGLE5 < -49]
OFF
HAND.OPEN
END
TO PICK.FROM.CHUTE
TALKTO "MOTORA
SETLEFT
ON
WAITUNTIL [ANGLE5 > 0]
OFF
END
TO HAND.OPEN
TALKTO "MOTORB
SETLEFT
ONFOR 2.5
END
TO HAND.CLOSE
TALKTO "MOTORB
SETRIGHT
ONFOR 5
END
TO PLACE.ALL
PLACE.LOCAL
PLACE.DISTANT
PLACE.LOCAL
END